KouBot: Autonomous Mecanum-Wheeled Robot
Lightweight, Dockerized System for SLAM and Indoor Navigation
Overview
KouBot is a mecanum-wheeled indoor robot designed for autonomous navigation using ROS 2. It runs entirely in Docker on a Raspberry Pi 4B and features holonomic movement, SLAM, and real-time navigation for robust indoor autonomy.
Goal
Design and build an affordable, ROS 2-based indoor robot with full autonomous navigation capabilities, leveraging Docker for reproducibility and portability.
Key Features
- Mecanum-wheel drive for omnidirectional movement.
- ROS 2 nodes launched fully via Docker on a Raspberry Pi 4B.
- Real-time SLAM and autonomous navigation.
- Modular sensor integration (LiDAR, IMU).
Technical Approach
Hardware
- Base: Mecanum-wheeled chassis.
- Controller & Motor Driver: Arduino Mega 256 and Dual L298N H-Bridge modules.
- Sensors: 360° LiDAR, MPU9250 IMU.
- Compute: Raspberry Pi 4B (4GB).
Software
- Framework: ROS 2 Humble.
- Deployment: Dockerized ROS 2 environment.
- Simulation: Gazebo.
Subsystems
- SLAM mapping, autonomous navigation.
- Serial communication with Arduino motor controller.
- Sensor fusion for localization.
Docker Integration
All ROS 2 packages and launch files are containerized, allowing isolated, consistent development environments and simplifying deployment on the Raspberry Pi.
Results
Teleoperation using PS4 Remote

KouBot supports manual control through a Bluetooth-connected PS4 controller, allowing for smooth and precise holonomic movement in all directions. This setup was essential for early testing, calibration, and validating motor functionality before implementing full autonomy.
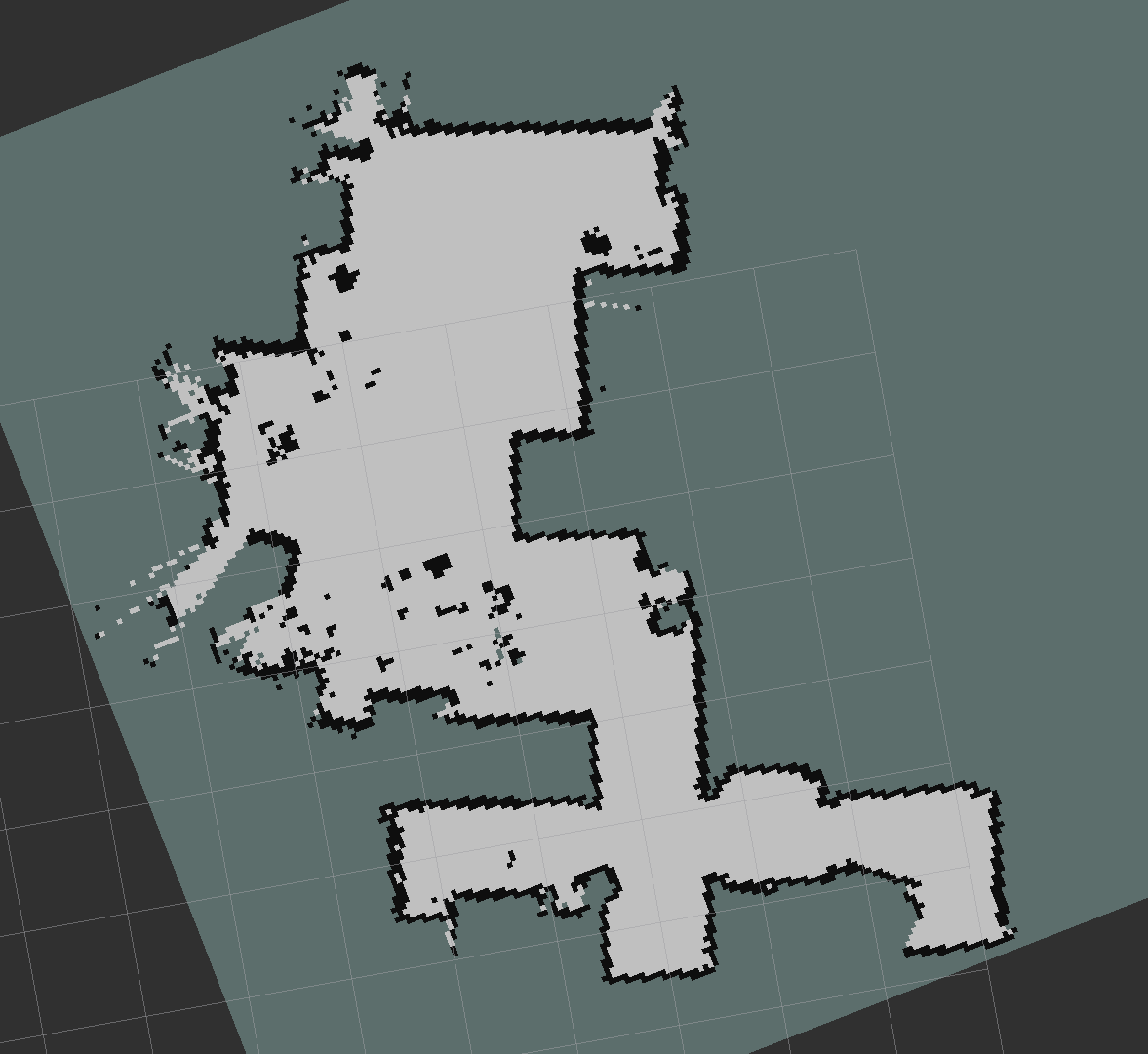
SLAM
Using SLAM Toolbox, KouBot was able to construct accurate 2D maps of its environment in real time.
Here is the resulting map:
Localization
KouBot currently performs localization using LiDAR-based scan matching. In the future, IMU data will be fused with LiDAR-derived odometry using an Extended Kalman Filter (EKF) to enhance robustness and accuracy.
Autonomous Navigation
KouBot uses the ROS 2 Nav2 stack to navigate point-to-point, avoiding obstacles and reaching goals with high precision.
Next Steps
While KouBot has proven its core SLAM and navigation capabilities, future improvements will focus on:
- Integrating full-state localization using an Extended Kalman Filter (EKF) to fuse LiDAR and IMU data.
- Planning to integrate a depth camera (OAK-D) for object detection and image processing experiments.
- Refining the motion controller with feedback from wheel encoders.