Autonomous Cleaning Robot
Real-world ROS 2 deployment with SLAM and full coverage path planning in dust-heavy industrial environments.
Overview
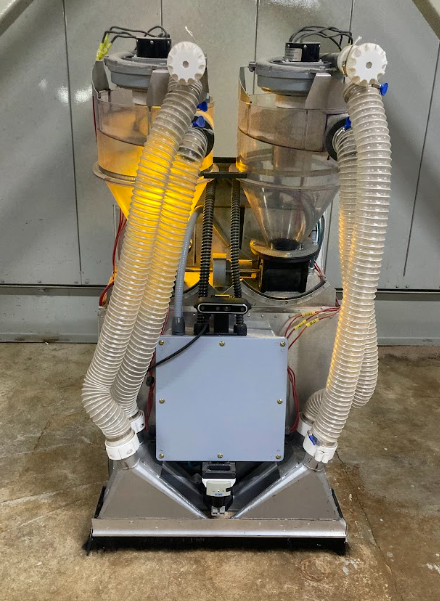
Sucky is an autonomous cleaning robot designed to navigate and operate in dust-heavy industrial environments.The project showcases the transition from simulation to a fully functioning real-world robot, leveraging ROS 2 for mapping, navigation, and full coverage path planning.
Goals
- Deploy SLAM, navigation and coverage planning from simulation to the real robot.
- Handle real-world complexities such as dust interference, dynamic obstacles, and uneven flooring.
- Tune and validate Full Coverage Path Planning for reliable, systematic cleaning.
- Develop a robust platform for future industrial-scale deployments.
Technical Approach
Hardware
- Drive Base: Two powered drive wheels combined with two free-spinning mecanum caster wheels for stability. The robot uses a differential drive configuration to control movement, making it simple yet effective for navigating industrial environments like a sawmill.
- LiDAR: Sick TIM781 for accurate and reliable obstacle detection.
- Depth Camera: Intel RealSense D455 equivalent for 3D perception and SLAM.
- Computer: Jetson Orin Nano.
- Microcontroller: Arduino Integration for vacuum and cleaning peripherals.
Software
- Frameworks: ROS 2 Humble, Foxglove.
- Simulator: Gazebo.
- Nav2 Stack: Provides navigation, planning, and autonomous movement.
- RTAB-Map: For 3D mapping and localization.
Key Contributions
- 3D Mapping: Implemented RTAB-Map for mapping and localization in the sawmill’s challenging layout.
- Behavior Trees (BTs): A custom behavior tree was developed to integrate SpiralSTC planning, based on the Full Coverage Path Planner repo from nobleo.
- Coverage Planning: Implemented the Full Coverage Path Planning (FCPP) planner plugin in ROS 2 for systematic cleaning. Added a an interpolation_resolution parameter for better fine-tuning.
- Navigation: Tuned Nav2 parameters for robust real-world navigation, with a major focus on the controller_server and MPPI (Model Predictive Path Integral) controller for robust path following and dynamic obstacle handling.
- LiDAR and Camera Filtering: Designed and implemented filtering strategies to handle airborne dust, a major challenge in the sawmill environment.
Results
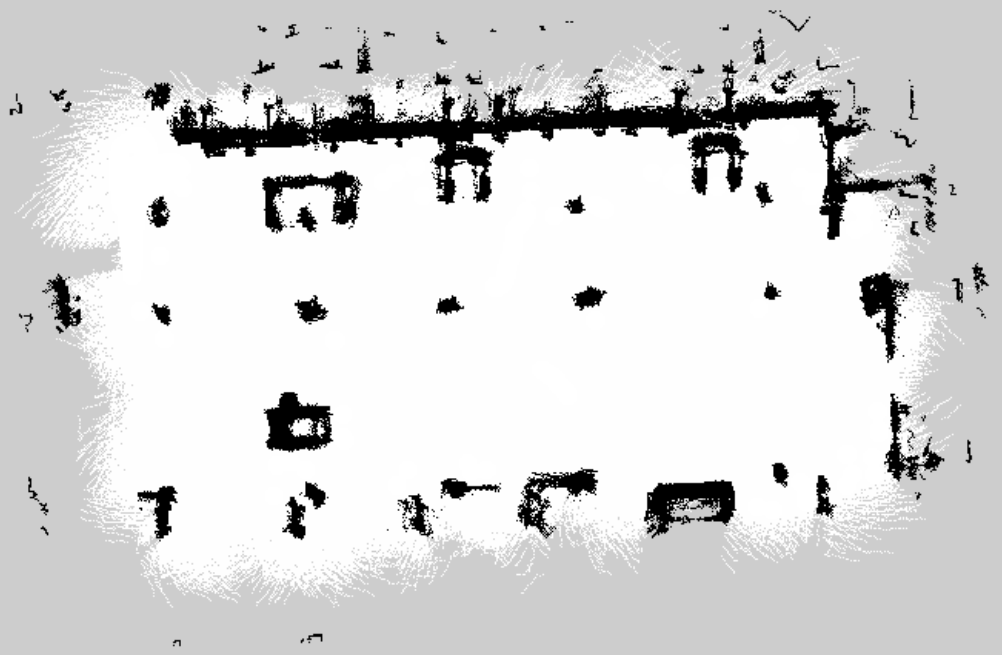
3D SLAM with RTAB-Map
From this 3D map, we can extract the point cloud data:
This 3D map allows us to extract a 2D slice that will serve as the base for navigation:
Full Coverage Path Planning
Cleaning Demo
Ideas for Improvement
Looking ahead, there are three primary areas for improvement that will significantly enhance the system’s performance, robustness, and usability:
- Enhanced dynamic obstacle avoidance strategy
- Integrate opennav_coverage into the real robot for finer control of coverage areas
- Adding higher-level error handling and notification logic
Some other future enhancements worth exploring with lower priority include:
- Hose detection pipeline
- Automated dumping process
- Automated charging
- Cleaning progress & robot status dashboard
For a more detailed explanation of these improvements, please check Improvements Report.
GitHub Repository
If you are also interested in the simulation side of this project, you can find it here.